ICS 311 #12A: Dynamic Programming
Prerequisite Review
Outline
- Problem Solving Methods and Optimization Problems
- Introducing DP with the Rod Cutting Example
Readings and Screencasts
- Read CLRS Sections 15.1-15.3. The focus is on the problem solving strategy: Read the
examples primarily to understand the Dynamic Programming strategy rather than to memorize the
specifics of each problem (although you might be asked to trace through some of the algorithms).
- Screencasts 12A,
12B (till minute 5:00),
12D (till minute 6:16)
(also in Laulima)
Setting the Context
Problem Solving Methods
In this course we study many well defined algorithms, including (so far) those for ADTs, sorting
and searching, and others to come to operate on graphs. Quality open source implementations exist:
you often don't need to implement them.
But we also study problem solving methods that guide the design of algorithms for your specific
problem. Quality open source implementations may not exist for your specific problem: you may need
to:
- Understand and identify characteristics of your problem
- Match these characteristics to algorithmic design patterns.
- Use the chosen design patterns to design a custom algorithm.
Such problem solving methods include divide & conquer, dynamic programming, and greedy
algorithms (among others to come).
Optimization Problems
An optimization problem requires finding a/the "best" of a set of alternatives
(alternative approaches or solutions) under some quality metric (which we wish to maximize) or cost
metric (which we wish to minimize).
Dynamic Programming is one of several methods we will examine. (Greedy algorithms and linear
programming can also apply to optimization problems.)
Basic Idea of Dynamic Programming
Dynamic programming solves optimization problems by combining solutions to subproblems.
This sounds familiar: divide and conquer also combines solutions to subproblems, but
applies when the subproblems are disjoint. For example, here is the recursion tree
for merge sort on an array A[1..8]. Notice that the indices at each level do not overlap):
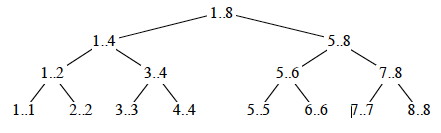
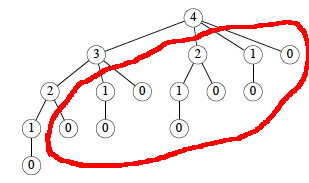
Dynamic programming applies when the subproblems overlap. For example, here is
the recursion tree for a "rod cutting" problem to be discussed in the next section (numbers indicate
lengths of rods). Notice that not only do lengths repeat, but also that there are entire subtrees
repeating. It would be redundant to redo the computations in these subtrees.
Dynamic programming solves each subproblem just once, and saves its answer in a
table, to avoid the recomputation. It uses additional memory to save computation time: an
example of a time-memory tradeoff.
There are many examples of computations that require exponential time without dynamic programming
but become polynomial with dynamic programming.
Example: Rod Cutting
This example nicely introduces key points about dynamic programming.
Suppose you get different prices for steel rods of different lengths. Your supplier provides long
rods; you want to know how to cut the rods into pieces in order to maximize revenue. Each cut is
free. Rod lengths are always an integral number of length units (let's say they are
centimeters).
Input: A length n and a table of prices pi for i = 1, 2, ...,
n.
Output: The maximum revenue obtainable for rods whose lengths sum to n, computed as
the sum of the prices for the individual rods.
We can choose to cut or not cut at each of the n-1 units of measurement. Therefore one can
cut a rod in 2n-1 ways.
If pn is large enough, an optimal solution might require no cuts.
Example problem instance

Suppose we have a rod of length 4. There are 2n-1 = 23 = 8 ways to
cut it up (the numbers show the price we get for each length, from the chart above):
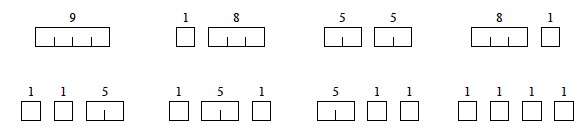
Having enumerated all the solutions, we can see that for a rod of length 4 we get the most
revenue by dividing it into two units of length 2 each: p2 + p2
= 5 + 5 = 10.
Optimal Substructure of Rod Cutting
Any optimal solution (other than the solution that makes no cuts) for a rod of length > 2 results in
at least one subproblem: a piece of length > 1 remaining after the cut.
Claim: The optimal solution for
the overall problem must include an optimal solution for this subproblem.
Proof: The proof is a "cut and
paste" proof by contradiction: if the overall solution did not include an optimal solution for this
problem, we could cut out the nonoptimal subproblem solution, paste in the optimal subproblem
solution (which must have greater value), and thereby get a better overall solution, contradicting
the assumption that the original cut was part of an optimal solution.
Therefore, rod cutting exhibits optimal substructure: The optimal solution to the original
problem incorporates optimal solutions to the subproblems, which may be solved
independently. This is a hallmark of problems amenable to dynamic programming. (Not all
problems have this property.)
Continuing the example
Here is a table of ri, the maximum revenue for a rod of length i, for
this problem instance.
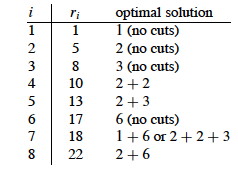
To solve a problem of size 7, find the best solution for subproblems of size 7; 1 and
6; 2 and 5; or 3 and 4. Each of these subproblems also exhibits optimal substructue.
One of the optimal solutions makes a cut at 3cm, giving two subproblems of lengths 3cm and
4cm. We need to solve both optimally. The optimal solution for a 3cm rod is no cuts. As we saw
above, the optimal solution for a 4cm rod involves cutting into 2 pieces, each of length 2cm. These
subproblem optimal solutions are then used in the solution to the problem of a 7cm rod.
Quantifying the value of an optimal solution
The next thing we want to do is write a general expression for the value of an optimal solution
that captures its recursive structure.
For any rod length n, we can determine the optimal revenues rn by taking
the maximum of:
- pn: the price we get by not making a cut,
- r1 + rn-1: the maximum revenue from a rod of 1cm
and a rod of n-1cm,
- r2 + rn-2: the maximum revenue from a rod of 2cm
and a rod of n-2cm, ....
- rn-1 + r1
So, rn = max (pn, r1 +
rn-1, r2 + rn-2,
.... rn-1 + r1).
There is redundancy in this equation: if we have solved for ri and
rn-i, we don't also have to solve for
rn-i and ri.
A Simpler Decomposition
Rather than considering all ways to divide the rod in half, leaving two subproblems, consider all ways to cut off the
first piece of length i, leaving only one subproblem of length n - i:
We don't know in advance what the first piece of length i should be, but we do know that
one of them must be the optimal choice, so we try all of them.
Recursive Top-Down Solution
The above equation leads immediately to a direct recursive implementation (p is the price
vector; n the problem size):

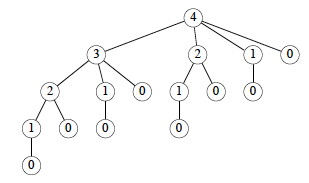
This works but is inefficient. It calls itself repeatedly on subproblems it has already
solved (circled). Here is the recursion tree for n = 4:
In fact we can show that the growth is exponential. Let T(n) be the number of calls
to Cut-Rod with the second parameter = n.
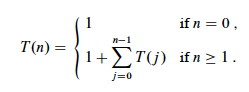
This has solution 2n. (Use the inductive hypothesis that it holds for j
< n and then use formula A5 of Cormen et al. for an exponential series.)
Dynamic Programming Solutions
Dynamic programming arranges to solve each sub-problem just once by saving the solutions in a
table. There are two approaches.
Top-down with memoization
Modify the recursive algorithm to store and look up results in a table r. Memoizing
is remembering what we have computed previously.
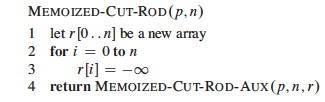
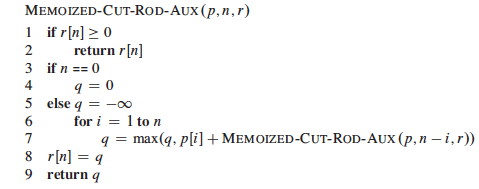
The top-down approach has the advantages that it is easy to write given the recursive structure
of the problem, and only those subproblems that are actually needed will be computed. It has the
disadvantage of the overhead of recursion.
Bottom-up
One can also sort the subproblems by "size" (where size is defined according to which problems
use which other ones as subproblems), and solve the smaller ones first.
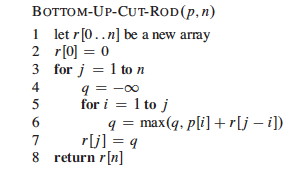
The bottom-up approach requires extra thought to ensure we arrange to solve the subproblems
before they are needed. (Here, the array reference r[j - i] ensures that we
only reference subproblems smaller than j, the one we are currently working on.)
The bottom-up approach can be more efficient due to the iterative implementation (and with
careful analysis, unnecessary subproblems can be excluded).
Asymptotic running time
Both the top-down and bottom-up versions run in Θ(n2) time.
- Bottom-up: there are doubly nested loops, and the number of iterations for the inner loop
forms an arithmetic series.
- Top-down: Each subproblem is solved just once. Subproblems are solved for sizes 0, 1,
... n. To solve a subproblem of size n, the for loop iterates n
times, so over all recursive calls the total number of iterations is an arithmetic
series. (This uses aggregate analysis, covered in a later lecture.)
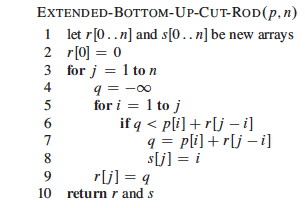
Constructing a Solution
The above programs return the value of an optimal solution. To construct the solution itself, we
need to record the choices that led to optimal solutions. Use a table s to record the place
where the optimal cut was made (compare to Bottom-Up-Cut-Rod):
For our problem, the input data and the tables constructed are:
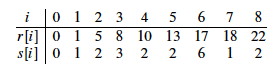
We then trace the choices made back through the table s with this procedure:
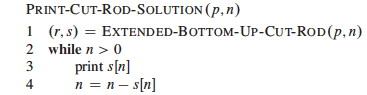
Trace the calls made by Print-Cut-Rod-Solution(p, 8)...
Four Steps of Problem Solving with Dynamic Programming
In general, we follow these steps when solving a problem with dynamic programming:
- Characterize the structure of an optimal solution:
- How are optimal solutions composed of optimal solutions to subproblems?
- Assume you have an optimal solution and show how it must decompose
- Sometimes it is useful to write a brute force solution, observe its redunancies, and
characterize a more refined solution
- e.g., our observation that a cut produces one to two smaller rods that can be solved
optimally
- Recursively define the value of an optimal solution:
- Write a recursive cost function that reflects the above structure
- e.g., the recurrence relation shown
- Compute the value of an optimal solution:
- Write code to compute the recursive values, memoizing or solving smaller problems
first to avoid redundant computation
- e.g., Bottom-Up-Cut-Rod
- Construct an optimal solution from the computed information:
- Augment the code as needed to record the structure of the solution
- e.g., Extended-Bottom-Up-Cut-Rod and Print-Cut-Rod-Solution
The steps are illustrated in the next example.
Other Applications
Another application of Dynamic Programming is covered in the Cormen et al. textbook (Chapter 15.2).
I briefly describe the problem here, but you are responsible for reading the details of the solution in the book.
Optimizing Matrix-Chain Multiplication
Many scientific and business applications involve multiplication of chains of matrices ⟨
A1, A2, A3, ... An ⟩. Since matrix
multiplication is associative, the matrices can be multiplied with their neighbors in this sequence
in any order. The order chosen can have a huge difference in the number of multiplications
required. For example suppose you have A, a 2x100 matrix, B (100x100) and C (100x20). To compute
A*B*C:
(A*B) requires 2*100*100 = 20000 multiplications, and results in a 2x100 matrix. Then you need to multiply by C: 2*100*20 = 4000 multiplications, for a total of 24,000 multiplications (and a 2x20 result).
(B*C) requires 100x100x20 = 200000 multiplications, and results in a 100x20 matrix. Then you need to multiply by A: 2*100*20 = 4000 multiplications, for a total of 204,000 multiplications (and the same 2x20 result).
The Matrix-Chain Multiplication problem is to determine the optimal order of
multiplications (not to actually do the multiplications). For three matrices I was able to
figure out the best sequence by hand, but some problems in science, business and other areas involve
many matrices, and the number of combinations to be checked grows exponentially.
Next
In Topic 12B, we will continue studying Dynamic Programming with more examples.
Nodari Sitchinava (based on material by Dan Suthers)
Images are from the instructor's material for Cormen et al. Introduction to Algorithms, Third
Edition.